|
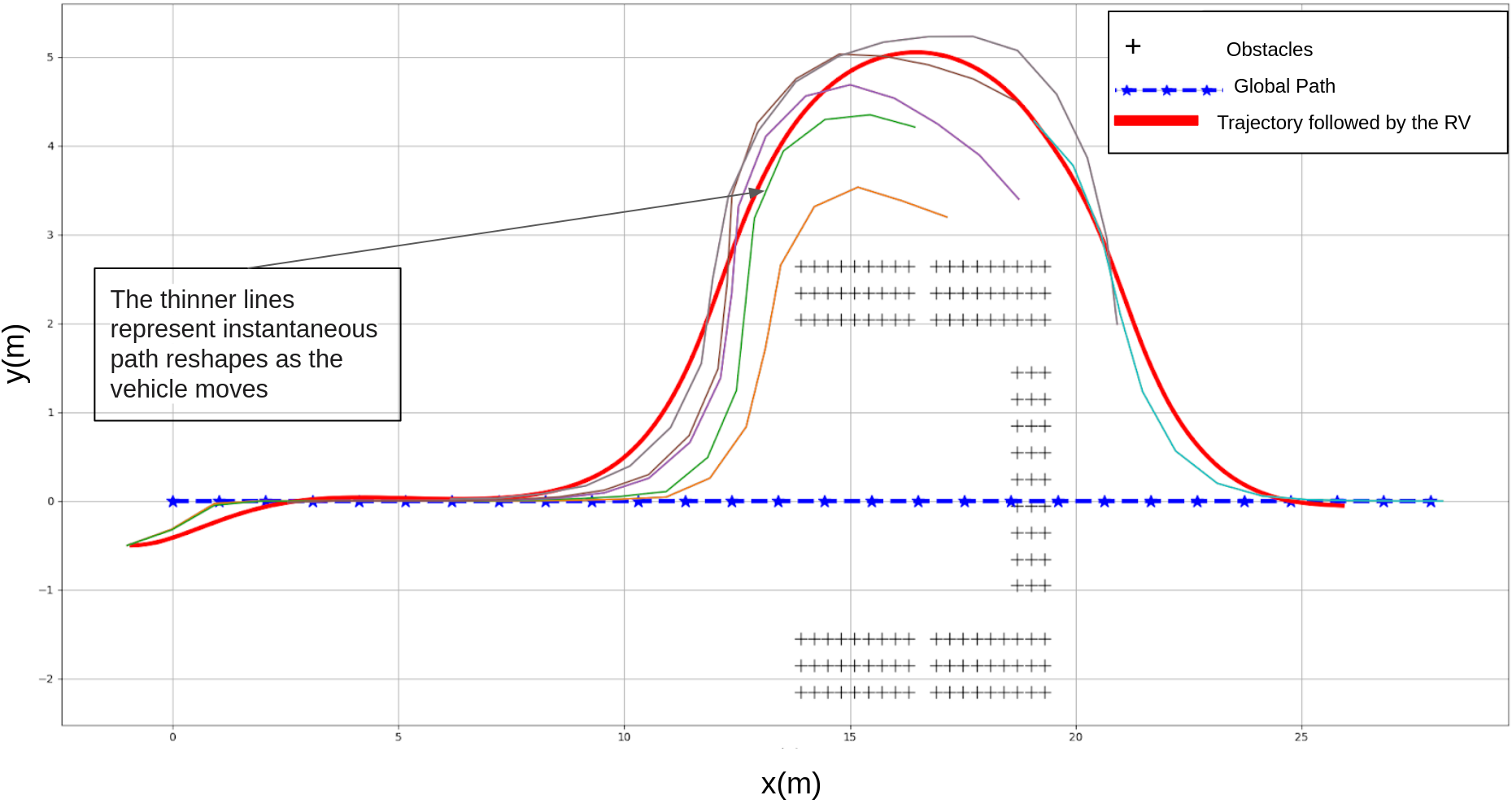
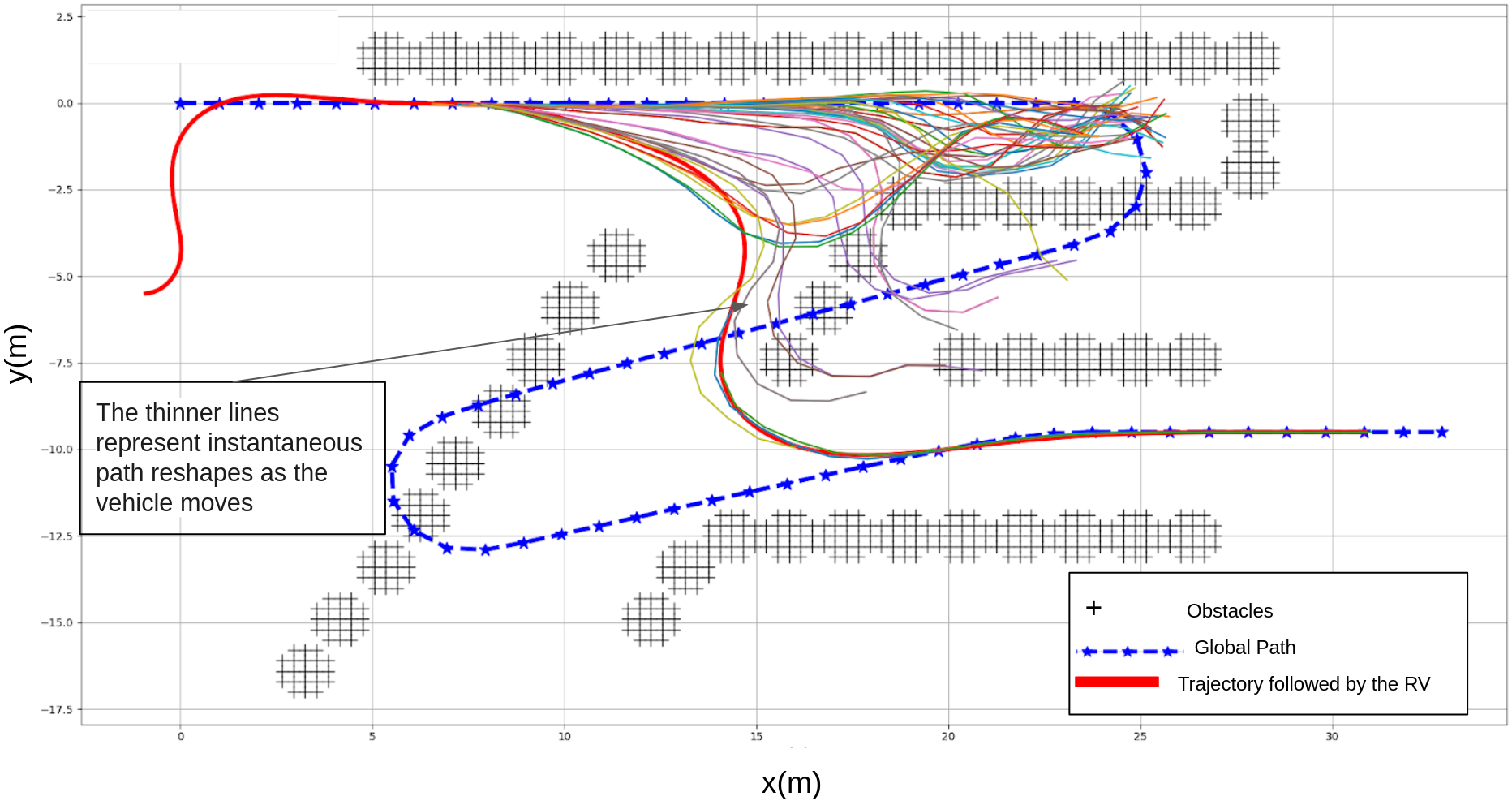
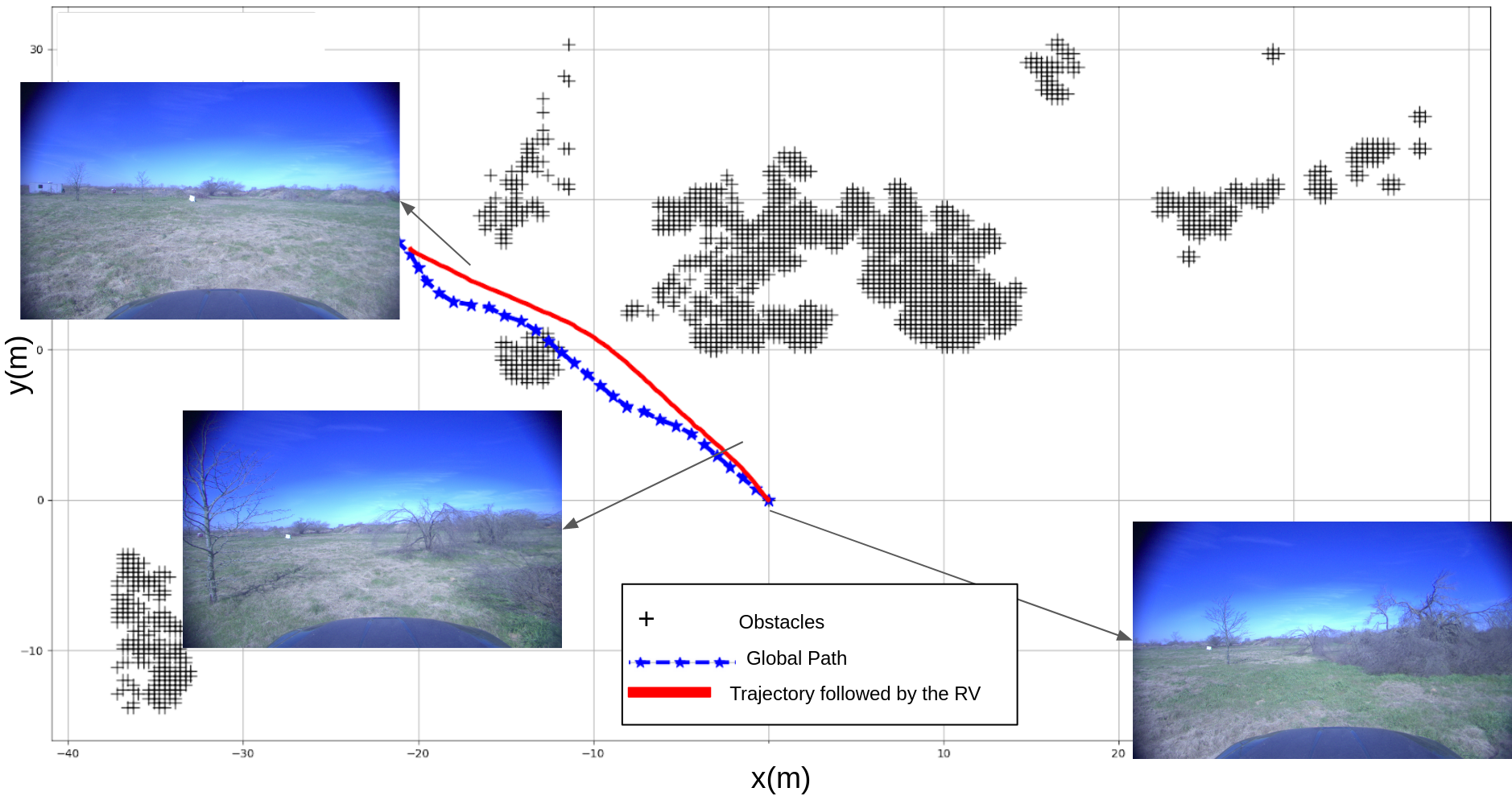
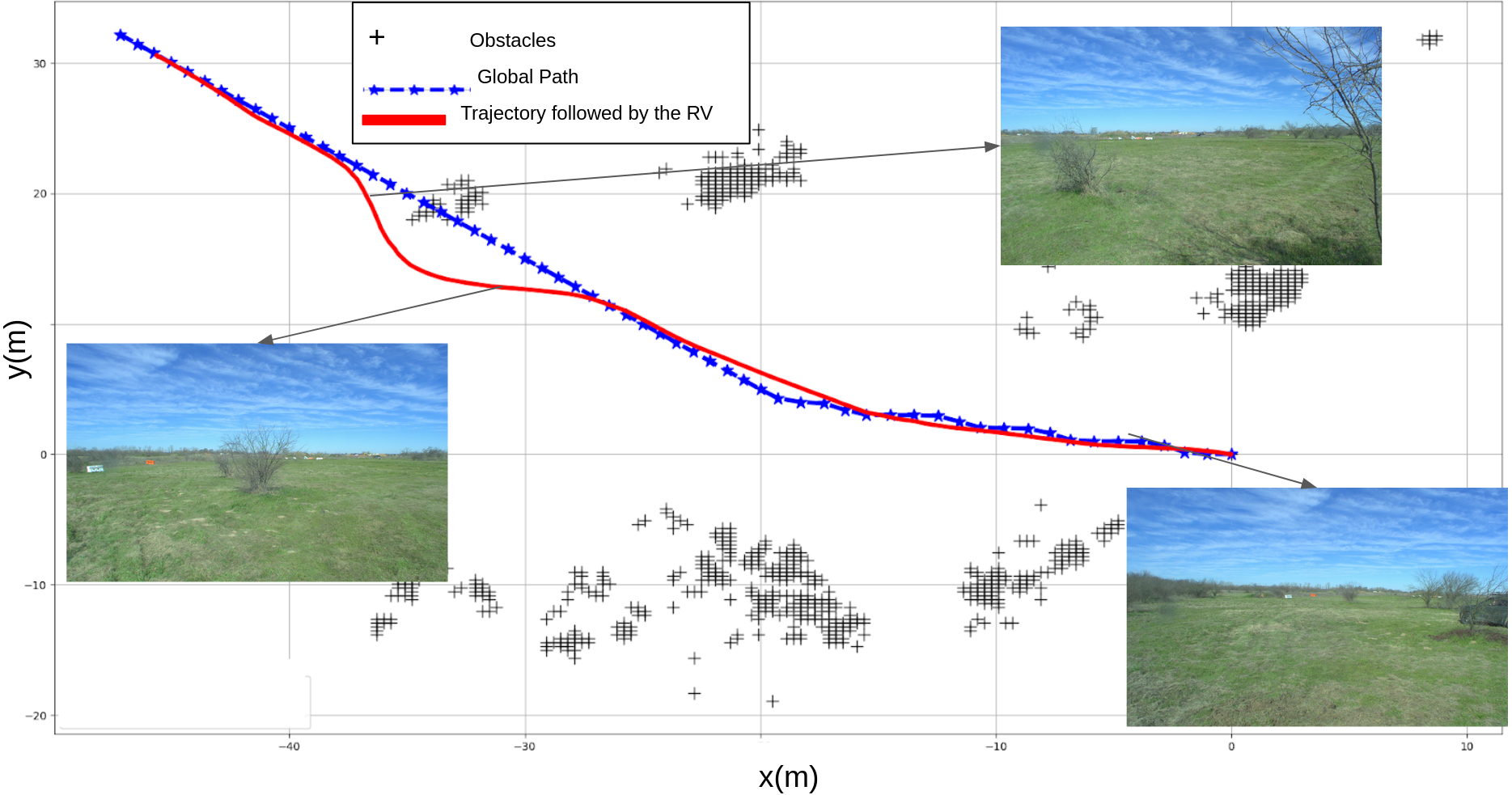
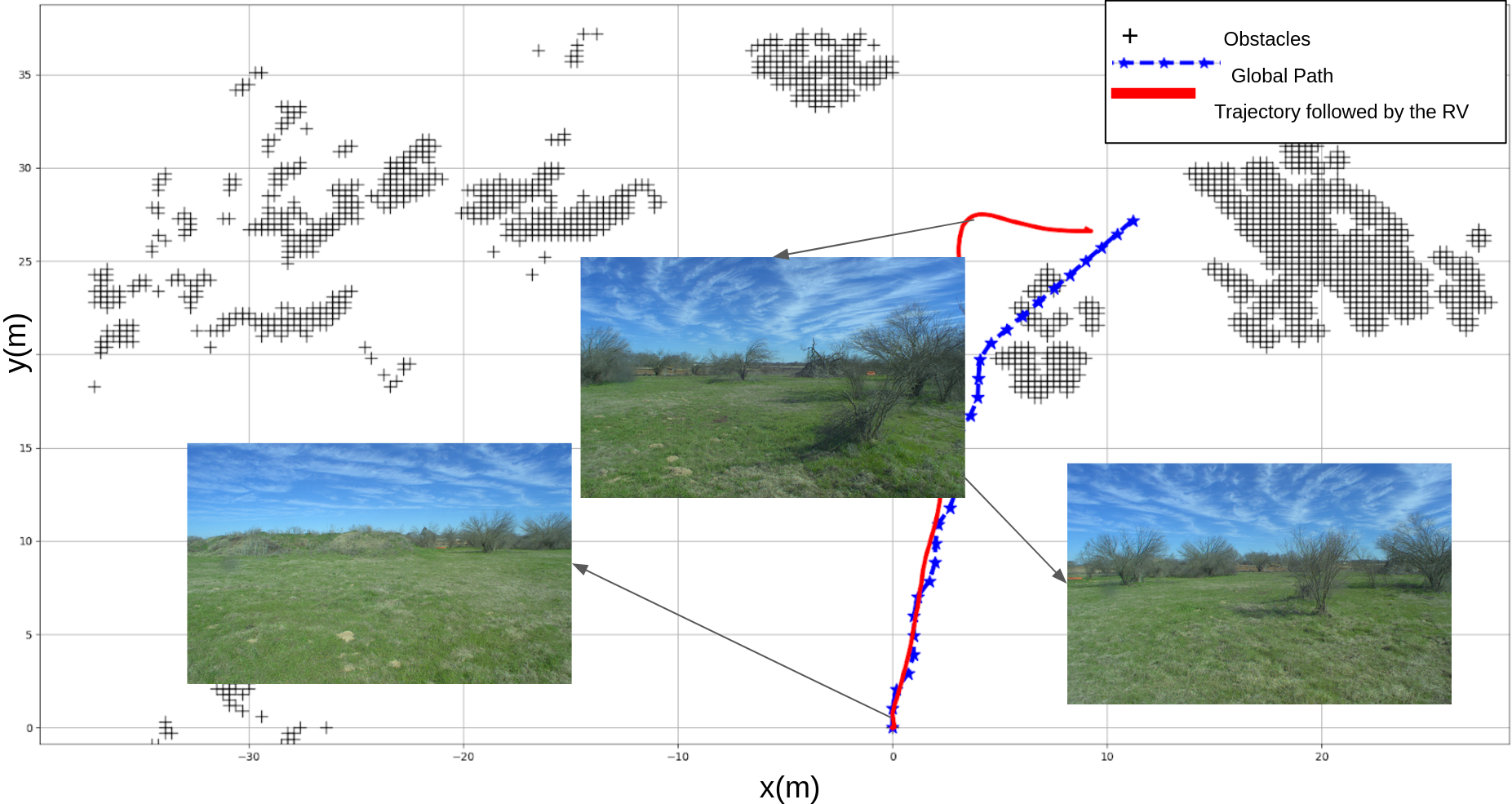
This paper proposes a path planner that reshapes a global path locally in response to sensor-based observations of obstacles in the environment.
Two fundamental concepts enable the resultant algorithm (a) a path-following synthetic vehicle whose steering actions are non-myopically
optimized to result in a smooth traversible path that meets path curvature constraints, and (b) a path aware turning moment-field that
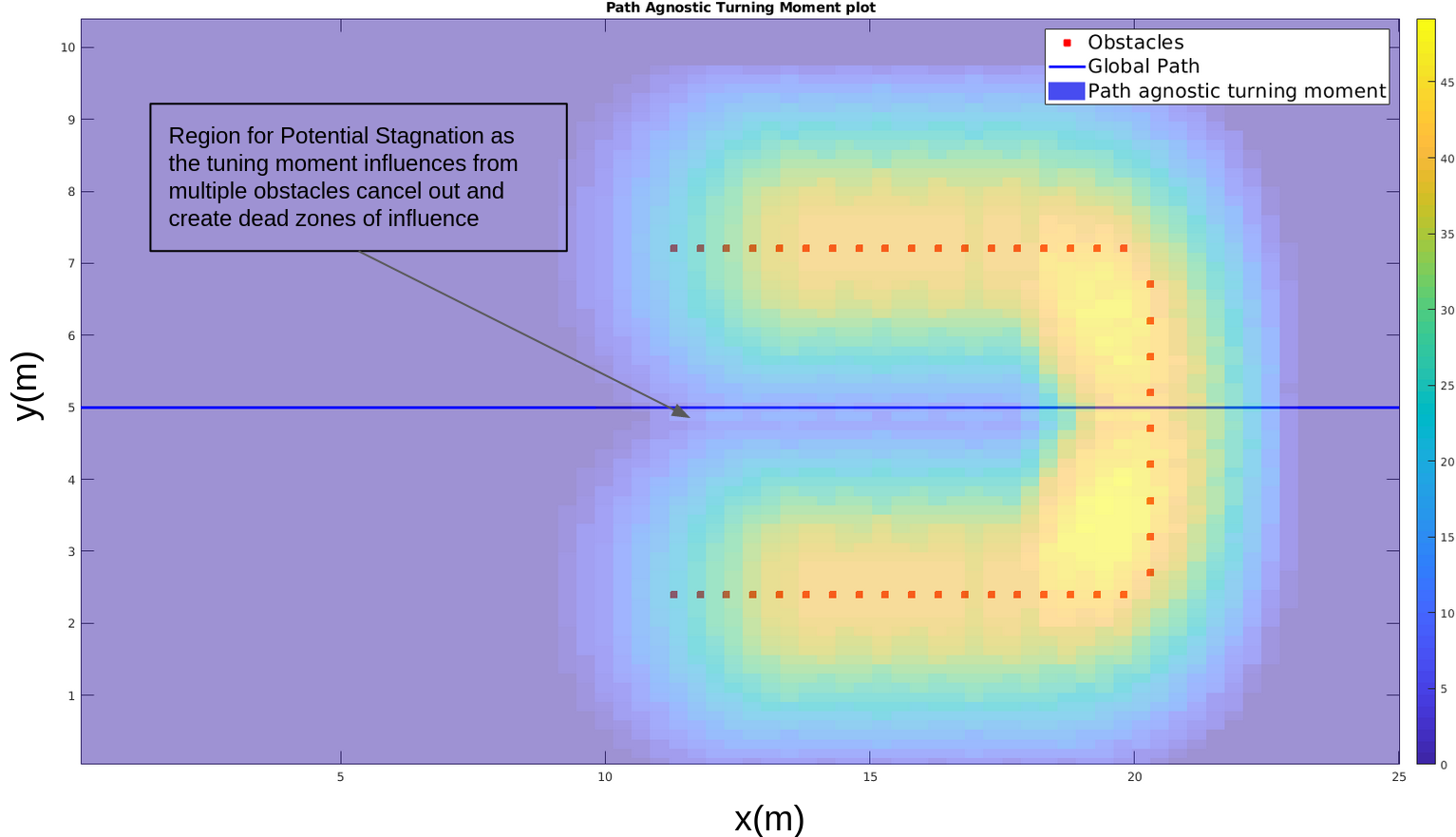
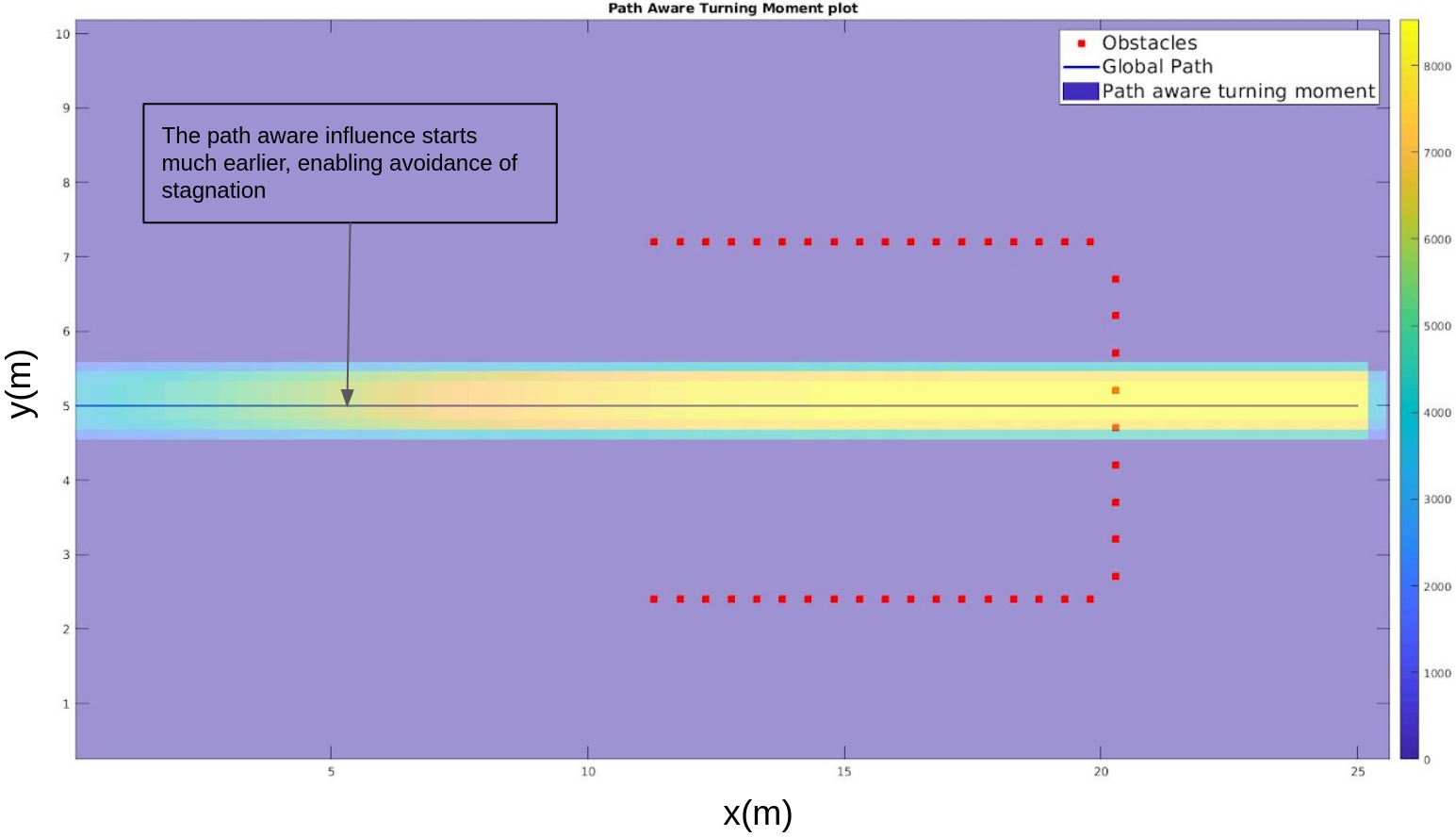
enables obstacle avoidance while eluding the typical local-minimum-induced stagnation associated with potential field methods. The use of the
combination of the two concepts results in a reduced action space over which optimization needs to be performed towards minimizing the path
deviation subject to obstacle avoidance, and thus results in an efficient algorithm that can be implemented online. We demonstrate the algorithm
in simulations as well as in field experiments, performing real time local path planning and obstacle avoidance on two different vehicle platforms
(an ackerman steering vehicle two-axled vehicle, and a differential-steering 4-axled vehicle) in an unstructured off-road terrain.
|